|
|





 1
1 2
2 3
3 4
4 5
5
|
Robot Development: NIH funds robot development for health improvement & quality of life. |
|
|
Hikes To Plane Crash Sites Littleton Downtown Riverwalk Enjoying Mt. Washington Franklin's Lesson For Today NH Helicopter Rides FREE Stuff To Do NH Lupine Photos Avoiding Romance Scams Pittsburg NH Profile Mascoma Lake Profile Farm To Table Restaurants Carroll NH (Twin Mtn.) Profile Colebrook NH Profile Ben Kilham Profile Whitefield NH Profile Clark's Trading Post
Seussical (9/6-15) 2001 Space Odyssey (9/7) Muster in the Mountains (9/7-9) Wingzilla (9/8) Canzoniere Grecanico Salentino (9/9) Things [Mom] Taught Me (9/13-23) Reach the Beach (9/14-15) WM Storytelling Festival (9/14-16) Metallak Race (9/15) Mandeville & Richards (9/15) Cohase Film Slam (9/16) Tricycle Grand Prix (9/16) Rodney Crowell (9/21) NH Highland Games (9/21-23) Don Who (9/22) Harvest Celebration (9/22) Health & Wellness Fair (9/22) Jeep Invasion (9/22) Lakes Region Tri Festival (9/22-23) Pat Metheny (9/26) Driving Miss Daisy (9/27 - 10/6) Neko Case (9/27) Shot of JD (9/28) Dixville Half Marathon (9/29) New Hampshire Marathon (9/29) Matthew Odell (9/30) Lincoln Fall Craft Festival (10/6&7) Sparrow Blue & Crowes Pasture (10/6) Oktoberfest (10/6-7) White Mountain Oktoberfest (10/6-7) Fall Foliage Celebration (10/6-8) Sandwich Fair (10/6-8) Paddle the Border (10/7) Lincoln Fall Craft Festival (10/7-9) Shadow Play (10/10) Killer Joe (10/11-21) Greg Brown (10/12) Camping & RV Show (10/12-14) Riverfire & Horrorfest (10/13) Jay Stollman Band (10/19) Murder Dinner Train (10/19-20) Pumpkin Patch Express (10/19-21) All Things Pumpkin (10/20) Ethan Setiawan Band (10/20) Bettye LaVette (10/26) Murder Dinner Train (10/26-27) Pumpkin Patch Express (10/26-28) Berlin Jazz (10/27)





| |||||||||
|---|---|---|---|---|---|---|---|---|---|
Quick Links |
|||||||||
  
| |||||||||
Business Directory |
|||||||||
Androscoggin Valley Hospital
Moffett House Museum Northland Restaurant Perras Treasures Party Store Personal Touch Home Health White Mountain Cottages
more ►

Alpine Adventures Clark's Trading Post Cog Railway Conway Scenic Railroad Flume Fort Jefferson Fun Park Jericho Mountain ATV Park Kancamagus Highway Littleton Riverwalk Lost River Gorge Mountain Meadow Funplex Mt. Washington Auto Road Polar Caves Santa's Village Storyland Vertical Ventures Whale's Tail Water Park Woodstock Inn & Brewery
more ►
Bethlehem more ►
25 Great Summer Adventures Farm To Table Restaurants Hiking To Crash Sites Little Ski Areas Local Movie Theaters Local Performance Theaters Moose Tours
more ►
NH Cabins & Cottages
|
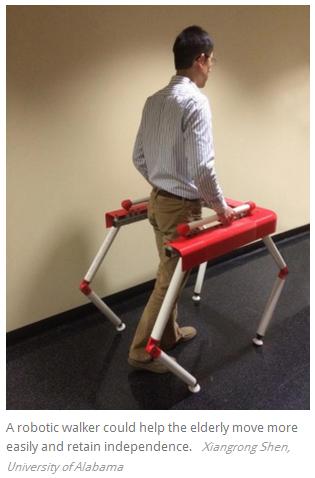 As individuals age, their ability to walk without assistance diminishes, leading to a decrease in physical activity and quality of life. To stay in their homes, elderly with mobility issues often require costly home modifications such as replacing steps with ramps or installing wheelchair lifts. The goal of this project is to develop a four-legged robot that enhances mobility, so that the elderly can remain physically active and enjoy a healthier life with reduced reliance on the assistance of caregivers or expensive home renovations.
As individuals age, their ability to walk without assistance diminishes, leading to a decrease in physical activity and quality of life. To stay in their homes, elderly with mobility issues often require costly home modifications such as replacing steps with ramps or installing wheelchair lifts. The goal of this project is to develop a four-legged robot that enhances mobility, so that the elderly can remain physically active and enjoy a healthier life with reduced reliance on the assistance of caregivers or expensive home renovations.
 This project proposes to create a hand-worn assistive device that uses computer vision to identify target objects in a user's environment, determine misalignment between the user's hand and the object, and then convey - via natural human-device interfaces - the hand motion needed to grasp the object. The device will contribute to the independent lives of the visually impaired in two major ways: It will enhance the individual's ability to travel independently by helping the user identify moveable obstacles and manipulate them so that they can pass, and it will assist in object grasping for non-navigational purposes such as identifying and correctly maneuvering a specific door handle.
This project proposes to create a hand-worn assistive device that uses computer vision to identify target objects in a user's environment, determine misalignment between the user's hand and the object, and then convey - via natural human-device interfaces - the hand motion needed to grasp the object. The device will contribute to the independent lives of the visually impaired in two major ways: It will enhance the individual's ability to travel independently by helping the user identify moveable obstacles and manipulate them so that they can pass, and it will assist in object grasping for non-navigational purposes such as identifying and correctly maneuvering a specific door handle.
 through dedication and hard work - are important factors that influence a child's mental health, academic achievement, and general well-being. The goal of this project is to create an autonomous, long-term social robotic companion for children that will promote and assess curiosity and a growth mindset through various interactions. After developing the robot, the researchers plan to evaluate its influence by conducting a six-month longitudinal study in which children learn and play while interacting with the robot companion.
through dedication and hard work - are important factors that influence a child's mental health, academic achievement, and general well-being. The goal of this project is to create an autonomous, long-term social robotic companion for children that will promote and assess curiosity and a growth mindset through various interactions. After developing the robot, the researchers plan to evaluate its influence by conducting a six-month longitudinal study in which children learn and play while interacting with the robot companion.

